Peamised erinevused : Güroskoopi kasutatakse nurga pöörlemiskiiruse mõõtmiseks, samas kui kiirendusmõõtur suudab mõõta liikumise lineaarset kiirendust.

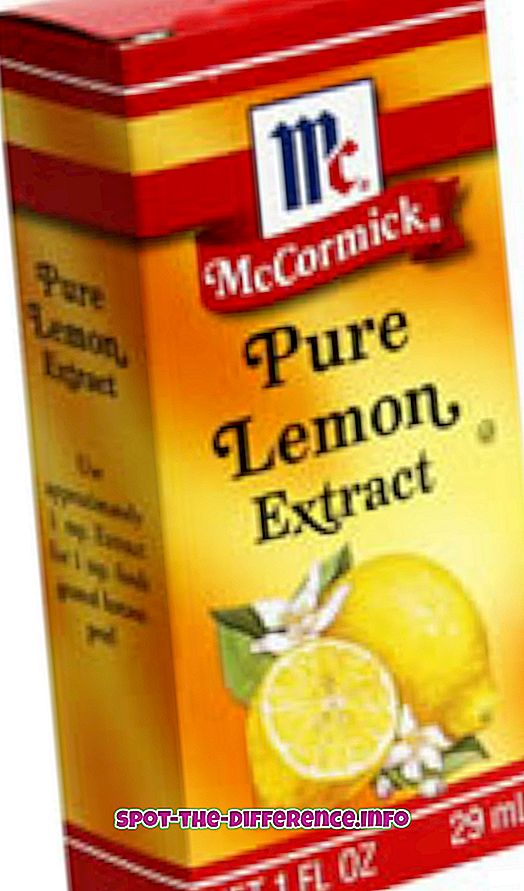
See koosneb pöörlevast rattast, mis on paigaldatud nii, et selle telg võib vabalt võtta mis tahes orientatsiooni. Selle keskne ratas on paigaldatud rõngaste või kummipaelade raamile. Neid klambreid toetatakse ühte otsas spindlile, mis on jälle paigaldatud alusele. See toimib nii, et keerates püüab see siiski oma positsiooni säilitada. See kujutab igasuguse liikumise vastupanu. Ketrusliikumine muutub kiiremaks ja sama keeruline on güroskoopi suunata.

Sensori elemendil ja nende toimimise põhimõtetel põhinevad kiirendusmõõturid on erinevad. See on mõeldud mitte-gravitatsioonilise kiirenduse mõõtmiseks. Kiirendusmõõturi mikroskoopilised kristallid võtavad arvesse iga kiirusega seotud vibratsiooni. See genereerib pinge, et luua lugemine mis tahes kiirendusel.
Enamik kiirendusmõõtureid on põhimõtteliselt Micro Electro mehaanilised andurid. Seda kasutatakse mobiiltelefonides telefoni orientatsiooni määramiseks. Kui seda ei kasutata, tuleb Theyy välja lülitada, kuna nad tarbivad palju energiat. Seetõttu võib kiirendusmõõtur mõõta seadme kiirendust erinevates mõõtmetes, samas kui güroskoop võib mõõta orientatsiooni (pöörlemiskiirust) erinevas mõõtmes.
Oluline on mainida, et praktikas saab kiirendusmõõtur mõõta ainult suunalist liikumist. Külgsuunaline orientatsioon või kallutamine tuvastatakse aga güroskoobi abil.
Güroskoobi ja kiirendusmõõturi võrdlus:
Güroskoop | Kiirendusmõõtur | |
Määratlus | seda kasutatakse pöörleva liikumise mõõtmiseks | Seda kasutatakse lineaarse liikumise ja gravitatsiooni samaaegseks mõõtmiseks |
Omadused |
|
|
Nihkumise saavutamine | Vaja on ühtset integratsiooni | Raske teine integratsioon vajalikku |
Signaali ja müra suhe | Kõrge | Madal |
Gravitatsiooni mõju | Ei | Signaali suurus muutub gravitatsiooni tõttu rikutud |