Põhierinevus: Roolivõimendi on süsteem, mis aitab rataste juhtimisel kasutada mootori jõudu. Manuaalne juhtimine on roolisüsteem, kus juhtimiseks kasutatakse manuaalset jõudu.
Juhtimine tähendab rataste juhtimise mehhanismi ettenähtud suunas. Te peate olema tuttav autode roolisüsteemidega. Juht kasutab ratastega läbitud kursuse juhtimiseks juhtimist. Roolivõimendi on süsteem, mis aitab ratastel juhtida mootori võimsust. Käsitsi juhtimine on täiesti erinevat tüüpi juhtimissüsteem, mille puhul roolimiseks kasutatakse manuaalset jõudu. Kuid tänapäeval on enamikul autodel roolivõimendi.
Roolivõimendi kohta räägime kui hüdrauliline roolivõimendi või elektriline roolivõimendi. Seega võime öelda, et elektrooniline roolivõimendi ja hüdrauliline roolivõimendi on tüüpi roolivõimendi ja seega mõlemad omavad kõiki roolivõimendi süsteemi omadusi. On kaks põhilist roolimehhanismi: -
- Rooli- ja hammasrataste juhtimine - selles süsteemis on roolivõlli külge kinnitatud hammasratta käik, mis tähendab, et kui rool on pööratud, pöörab see hammasratast (ringikujulist) ja seejärel liigub (lineaarne) hammasratta. Põhimõtteliselt kasutatakse rooliratta pöörlemissuunda ja teisendatakse see pöörlemissuunas lineaarseks liikumiseks. See lineaarne liikumine on vajalik rataste pööramiseks.
- Pallirulli ümberarvutamine - selles süsteemis kinnitatakse ussiratta külge karp, mis sisaldab paljusid kuullaagreid. Need kuullaagrid liiguvad ussiratta ja nende ümber
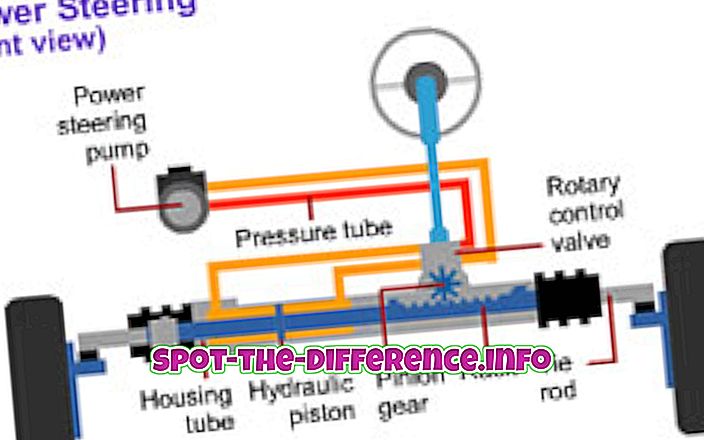

Mõistagem nüüd roolivõimendi põhimõisted. Roolisüsteemide abistamiseks kasutab roolivõimendi hüdraulikat või vedeliku survet. Kui kiiret pööret on vaja võtta, on eelistatud roolivõimendi kasutamine. On kolm peamist roolivõimendi osa - roolivõimendi pump, roolivõimendi vedeliku mahuti, rooliajam. Roolivõimendi võib olla kolme tüüpi: -
- Hüdrauliline roolivõimendi
- Elektriline hüdrauliline roolivõimendi (EPHS)
- täielikult elektriline roolivõimendi (EPS)
Hüdraulilised jõuülekanded kasutavad peamiselt hüdraulilist vedelikku ja selle hüdraulikaõli kaudu tekitatud rõhk aitab juhil rattad juhtida. EPHSis asendatakse tavalised roolivõimendiga pumbad juhtivad rihmad ja rihmarattad harjadeta mootoriga. Seda juhib elektrimootor ja see vähendab seega ka mootori teisest võimsust. Kolmas kategooria on elektriline roolivõimendi. Sellises süsteemis asendab elektrimootor hüdraulilist pumpa ja luuakse täielikult elektriline roolisüsteem. Elektrimootor on kinnitatud rooliratta või roolisamba külge. Väga oluline komponent on elektrooniline juhtimisseade, mis juhib juhtimisdünaamikat.
Enamik tänapäeval kasutatavatest roolisüsteemidest on roolivõimendi tüüpi. Väga vähesed süsteemid kasutavad käsitsi juhtimist. Kütusekulu ja väiksema emissiooni puhul eelistatakse EPS-d sageli.

Teisest küljest nõuab käsitsi juhtimine suuremaid jõupingutusi sõidukite juhtimiseks. Manuaalse juhtimissüsteemi ainus energiaallikas on jõud, mida juht rakendab roolile. Siiski võimaldab roolivõimendi alati manuaalse juhtimise olemasolu; see võib aidata mootori probleemi korral või süsteemi abisüsteemi tõrke korral.
Manuaalset juhtimissüsteemi on mitu tüüpi, nagu
- Uss ja sektor
- Uss ja rull
- Kaamera ja hoob
- Uss ja mutter
- hammasratas ja hammasratas
Mõned erinevused on loetletud järgmises tabelis: -
Roolivõim | Käsitsi juhtimine | |
Määratlus | Roolivõimendi on süsteem, mis aitab ratastel juhtida mõnda energiaallikat. | Käsitsi juhtimine on süsteem, kus juhtimiseks kasutatakse manuaalset jõudu. |
Mehhanism | Hüdrauliline: hammasratas ja hammasratas, ringikujuline pall ja mutter, uss ja rull, hüdrostaatiline Elektrilised: hammasratta ja hammasratas, veerepõhine EPS, hammasrattajuhtimisega EPS, hammasratta EPS | Manuaalsel roolilattil on hammasratas ja hammasratas, uss ja rull- ja ringluspall ning mutter. |
Vastus | Võrreldes kiire | Suhteliselt aeglane |
Vastupidavus ratta liikumisele | Vähem | Veel |
Eelistatud | Suhteliselt raskekaalulised sõidukid | Madala kaaluga sõidukid |
Elemendid | Hüdrauliline pump, vedeliku mahuti, voolikud, liinid; ja kas roolivõimendi rooliseadme külge monteeritud või selle külge kinnitatud jõuabiseade | Rool ja kolonn, käsitsi käigukast ja pidurivarras või hammasratas ja hammasratas, sidemed; rõngaste ja kuulliigendite juhtimine ning ratta spindli sõlmed |
Eelised | Kriitilistes olukordades absorbeerib liiklusõnnetused, minimaalsed pingutused, suurema ohutuse ja kontrollitavuse | mehaaniline ühendus rooliratta ja ratta vahel ning kõik komponendid hooldatakse jätkuvalt ilma abijõudu abita ja eelistatakse sõiduautodel |